





BirdBot in het water. Krediet: Dynamic Motiontrain van MPI-IS
Als de Tyrannosaurus Rex, die 66 miljoen jaar geleden leefde, een vergelijkbare beenstructuur had als de struisvogel die tegenwoordig in de savanne loopt, kunnen we aannemen dat de poten van de vogels de tand des tijds hebben doorstaan - een mooi voorbeeld van evolutionaire selectie.
Sierlijk, elegant, krachtig –Vogels die niet vliegen Als een struisvogel, mechanische wonderen. Struisvogels, waarvan sommige meer dan 100 kg wegen, trekken door de savanne met een snelheid tot 55 km/u. De uitstekende locomotorische prestaties van struisvogels worden mogelijk gemaakt door de beenstructuur van het dier. In tegenstelling tot mensen vouwen vogels gepresenteerd Terug wanneer ze hun benen naar hun lichaam trekken. Waarom doen dieren dit? Waarom is dit voetbewegingspatroon energie-efficiënt voor wandelen en hardlopen? En kan de beenstructuur van een vogel, met al zijn botten, spieren en pezen, worden overgedragen naar lopende robots?
Alexander Bedri Sprovitz heeft meer dan vijf jaar besteed aan het beantwoorden van deze vragen. Bij het Max Planck Institute for Intelligent Systems (MPI-IS) leidt hij de dynamische aandrijflijn. Zijn team werkt aan de interactie tussen biologie en robotica op het gebied van biomechanica en neurocontrole. De dynamische beweging van dieren en robots staat centraal in de collectie.
Samen met promovendus Albers Agamaliki Sarvestani bouwde Badri Spruvitz Robot Een poot is, net als zijn normale model, energiezuinig: de BirdBot heeft minder motoren nodig dan andere machines en kan in theorie worden opgeschaald tot een aanzienlijk formaat. Op 16 maart hebben Badri Spruitz, Agamaliki Sarvestani, Metin Siti Roboticist, directeur van het MPI-IS Institute en professor in de biologie Monica A. Daly van de Universiteit van Californië, Irvine, hun onderzoek in het beroemde tijdschrift Robotica wetenschap.

BirdBot met vogels. Krediet: Dynamic Motiontrain van MPI-IS
Een symmetrisch veerpezennetwerk bestaande uit spieren en pezen
Tijdens het lopen trekken mensen aan hun voeten en buigen hun knieën, maar de voeten en tenen wijzen vrijwel ongewijzigd naar voren. Het is bekend dat vogels anders zijn – in het stadium van slingeren vouwen ze hun poten naar achteren. Maar wat is de functie van deze beweging? Badri-Spröwitz en zijn team schrijven deze beweging toe aan een mechanische koppeling. “het is niet Zenuwstelselhet is niet elektrische impulsen, geen spieractiviteit”, legt Badri-Spröwitz uit. We veronderstelden een nieuwe functie van de voet-beenkoppeling via een netwerk van spieren en pezen die zich over meerdere gewrichten uitstrekken. “Deze spierpees met meerdere gewrichten coördineert het vouwen van de voet in de zwaaifase. In onze robot hebben we de dubbele mechanismen van het been en de voet, waardoor de robot krachtig en energiebesparend kan lopen. Onze resultaten die dit mechanisme in de robot demonstreren, doen ons geloven dat vergelijkbare efficiëntievoordelen ook gelden voor vogels, “legt hij uit.
Onderzoekers speculeren dat de koppeling van been- en voetgewrichten en de daarbij betrokken krachten en bewegingen de reden kunnen zijn waarom een dier zo groot als een struisvogel niet alleen snel kan rennen, maar ook kan opstaan zonder moe te worden. Een persoon met een gewicht van meer dan 100 kg kan goed en lang staan, maar alleen met de knieën “op slot” in gestrekte positie. Als iemand een beetje zit, wordt hij na een paar minuten moe. De vogel lijkt zich echter niets aan te trekken van de structuur van zijn gebogen poot; Veel vogels staan zelfs rechtop tijdens het slapen. Het been van de robot zou hetzelfde moeten kunnen: er zou geen motorvermogen nodig zijn om de constructie rechtop te houden.
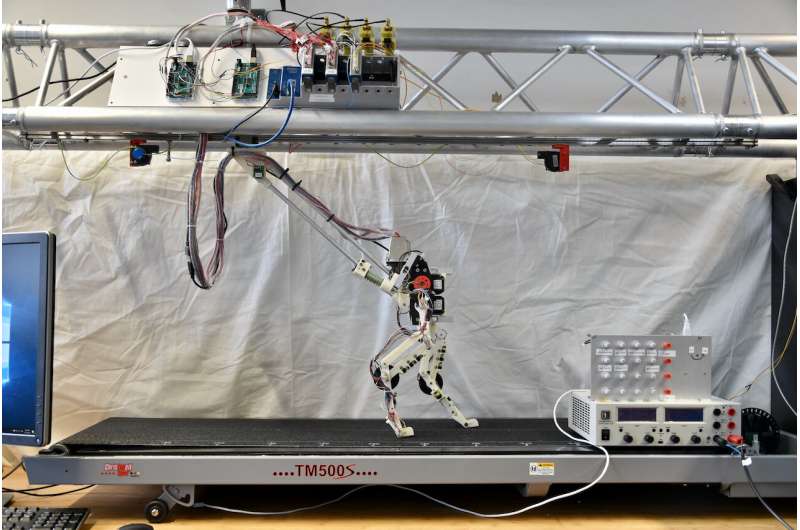
BirdBot op een loopband. Krediet: Dynamic Motiontrain van MPI-IS
Robot loopt op een loopband
Om hun hypothese te testen, bouwden de onderzoekers een robotbeen gemodelleerd naar het been van een loopvogel. Ze bouwden hun prothetische vogelpoot zo dat de voet geen motor bevatte, maar een gewricht met een veer- en kabelmechanisme. De voet is mechanisch bevestigd aan de rest van de beengewrichten door middel van kabels en katrollen. Elk been heeft slechts twee motoren – een motor voor de heupgewrichten, die het been heen en weer beweegt, en een kleine motor die het kniegewricht buigt om het been omhoog te trekken. Na de montage lieten de onderzoekers de BirdBot op een loopband lopen om de voeten van de robot te zien vouwen en ontvouwen. “De gewrichten van de voet en het been hoeven in de staande fase niet te worden geopereerd”, zegt Agamaliki Sarvestani. “De veren activeren deze gewrichten, en het meervoudige veerpeesmechanisme coördineert de bewegingen van de gewrichten. Wanneer het been in de zwaaifase wordt getrokken, maakt de voet de beenveer los – of spierpeesveer, zoals we denken dat het doet in dieren”, voegt Bedri Sprovitz toe. Videoclip waarin BirdBot het laboratorium van de onderzoeksgroep binnenloopt.
Geen inspanning bij het staan en bij het buigen van het been en de knie
Bij het staan verbruikt het been geen energie. “Vroeger moesten onze robots tegen de veer of met een motor werken, hetzij bij het staan of bij het optrekken van het been, om te voorkomen dat het been de grond raakt tijdens de beenzwaai. Deze energietoevoer is niet nodig in de BirdBot-poten, ” voegen Badri-Spröwitz en Aghamaleki Sarvestani toe: “Over het algemeen vereist de nieuwe robot slechts een kwart van de kracht van zijn voorganger.”
Nu wordt de loopband weer ingeschakeld, de robot begint te rennen en bij elke beweging van het been maakt de voet de beenveer losser. Om uit te schakelen, vertraagt de grote voetbeweging de kabel en zwaaien de overige beengewrichten losjes. Deze overgang van toestand, tussen staan en beenzwaaien, wordt bij de meeste robots verzorgd door een motor bij het gewricht. De sensor stuurt een signaal naar een controller die de motoren van de robot in- en uitschakelt. “Vroeger wisselden de actuatoren afhankelijk van of het been in de zwaai- of staande fase was. Nu neemt de voet deze functie over in de loopband, mechanisch schakelend tussen pose en zwaai. We hebben slechts één actuator bij het heupgewricht en één actuator nodig om buig de knie in de zwaaifase. We laten de veerpoot vast- en losmaken met op vogels geïnspireerde mechanica. Dit is sterk, snel en energiezuinig”, zegt Bedri Sprovitz.
Monica Dali merkte in verschillende van haar eerdere studies in de biologie op dat de structuur van de poot van de vogel niet alleen energie bespaart tijdens het lopen en staan, maar zich ook aanpast aan de natuur, zodat het voor het dier moeilijk is om te struikelen en zichzelf te verwonden. In haar experimenten met parelhoenders die over verborgen kuilen rennen, identificeerde ze de kracht van de opmerkelijke beweging van de vogels. Morfologische intelligentie is ingebouwd in het systeem waardoor een dier snel kan handelen – zonder erover na te hoeven denken. Dali toonde aan dat dieren hun benen tijdens beweging niet alleen beheersen met behulp van het zenuwstelsel. Als er onverhoopt een obstakel in de weg staat, speelt niet altijd de tastzin of het zicht van het dier een rol.
“De structuur met zijn multi-gewrichtsspierpezen en zijn unieke beweging van de voet kan verklaren waarom zelfs grote, zware vogels snel, agressief en energiezuinig rennen. Als je ervan uitgaat dat alles in de vogel gebaseerd is op voelen en handelen, en Als het dier op een onverwacht obstakel stapt, kan het dier niet snel genoeg reageren. Waarnemen en voelen, zelfs het doorgeven van prikkels en reactie kosten tijd, zegt Daly.
Daly’s werk over het opereren van vogels over een periode van 20 jaar laat echter zien dat vogels sneller reageren dan het zenuwstelsel toestaat, wat suggereert dat mechanistische bijdragen aan de bestrijding ervan bijdragen. Nu het team BirdBot heeft ontwikkeld, een bestand fysiek model Het laat direct zien hoe deze mechanismen werken, het is allemaal logisch: het been wordt mechanisch geschakeld als er een hobbel in de grond is. Schakelen gebeurt direct en zonder vertraging. Net als vogels onderscheidt de robot zich door een hoge bewegingsstijfheid.
Of het nu gaat om een Tyrannosaurus Rex schaal of een kleine kwartel, of een kleine of grote robotpoot. In theorie zouden metershoge poten nu kunnen worden geïmplementeerd om robots met een gewicht van enkele tonnen te vervoeren, die rondzwerven met weinig tot geen stroomtoevoer.
De kennis die is opgedaan met de BirdBot, ontwikkeld bij de Dynamic Locomotion Group en de University of California, Irvine, leidt tot nieuwe inzichten over dieren, die zich aanpassen aan de evolutie. Met robotica kunnen hypothesen uit de biologie worden getest en soms bevestigd, waardoor beide gebieden worden ontwikkeld.
Alexander Badri-Sproewitz et al, BirdBot bereikt een energiezuinige gang met minimale controle met behulp van een op vogels geïnspireerde beengrijper, robotica wetenschap (2022). DOI: 10.1126 / scirobotics.abg4055. www.science.org/doi/10.1126/scirobotics.abg4055
Introductie van
Max Planck Society
de Quote: BirdBot energiezuinig dankzij de natuur als model (2022, 16 maart) Ontvangen op 16 maart 2022 van https://techxplore.com/news/2022-03-birdbot-energy-efficient-nature.html
Op dit document rust copyright. Niettegenstaande elke eerlijke handel met het oog op eigen studie of onderzoek, mag geen enkel deel worden gereproduceerd zonder schriftelijke toestemming. De inhoud is uitsluitend bedoeld voor informatieve doeleinden.

“Reizende ninja. Onruststoker. Spekonderzoeker. Expert in extreme alcohol. Verdediger van zombies.”
More Stories
China is van plan het Tiangong-ruimtestation uit te breiden; Stel deze in op “Space Rule” omdat het ISS wordt uitgeschakeld
De Verenigde Staten detecteren het eerste geval van de H5N1-vogelgriep bij een varken, wat aanleiding geeft tot bezorgdheid voor de mens
NASA zal in 2025 de ruimtewandelingen aan boord van het internationale ruimtestation hervatten na een lek in het ruimtepak